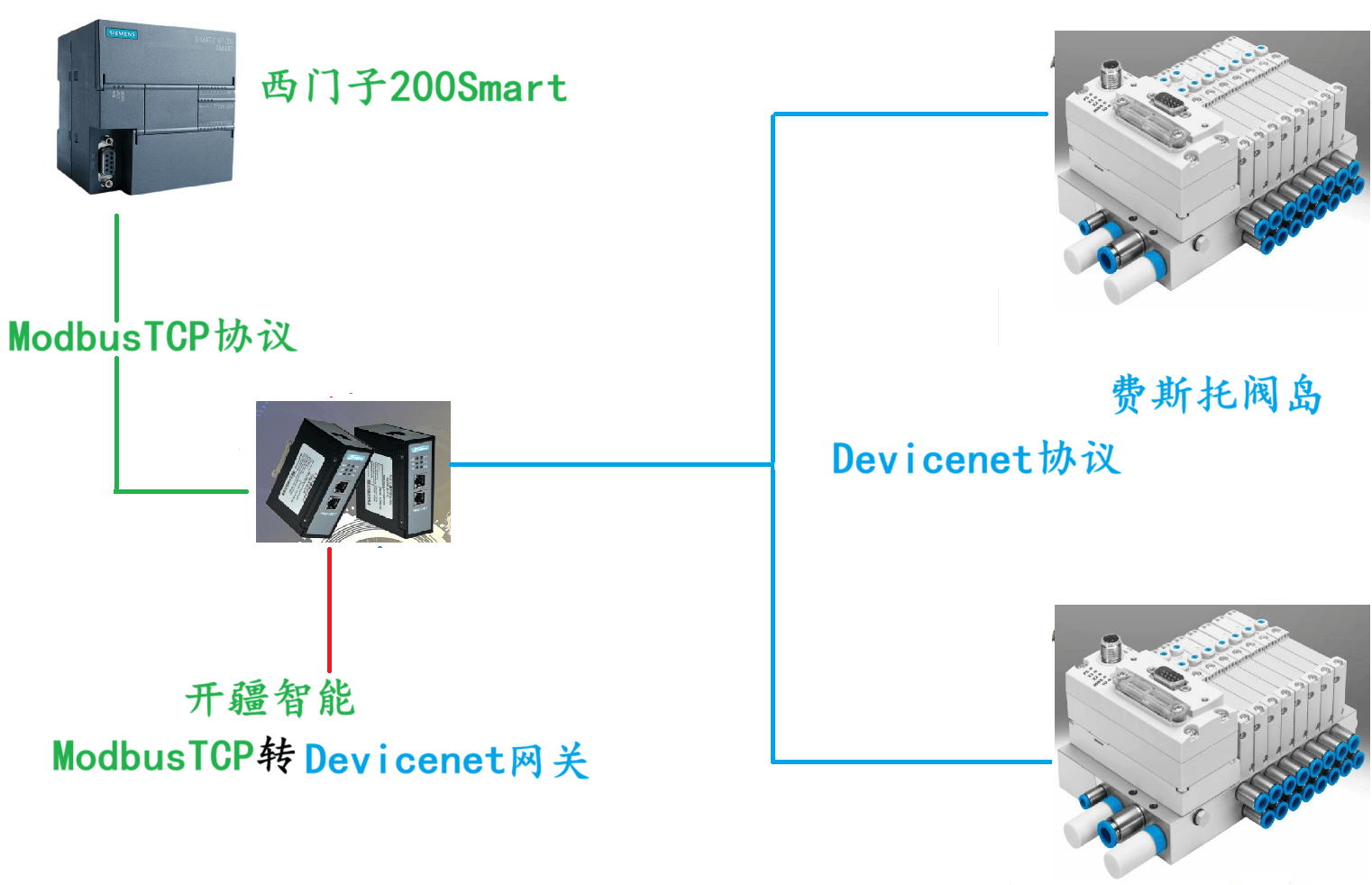
开疆智能ModbusTCP转Devicenet网关连接西门子200Smart与费托斯阀岛案例
本案例是客户使用西门子200Smart通过开疆智能ModbusTCP转Devicenet网关连接费托斯阀岛,具体配置过程如下。
配置过程
1. 打开网关配置软件“Gateway Configuration Studio”
新建项目,选择TCP-DevicenetM
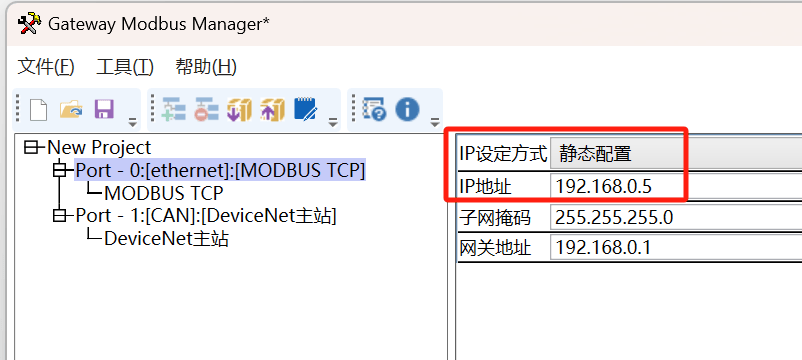
2. 设置网关的ModbusTCP一侧的IP地址以及数据长度。并设置网关短线后的数据处理方式以及字节交换顺序
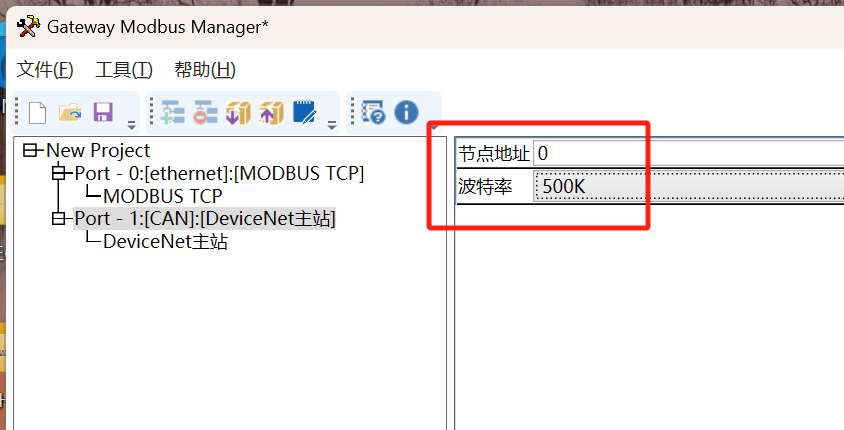
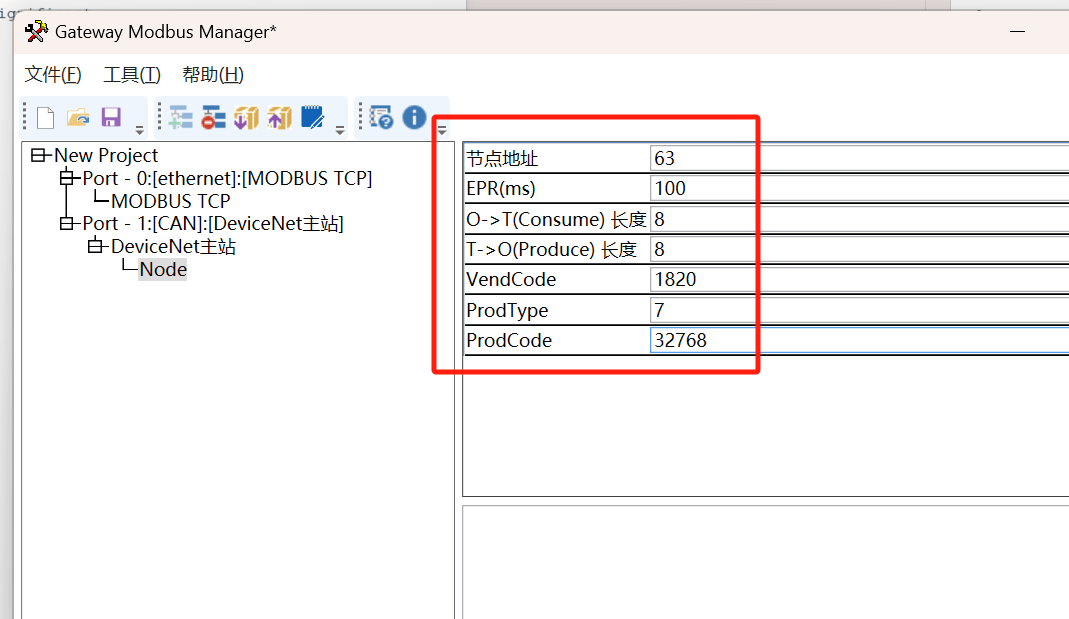
3. 设置网关的Devicenet节点地址以及波特率,与机器人配置保持一致。
通过从站EDS文件找到所需要填写的从站参数
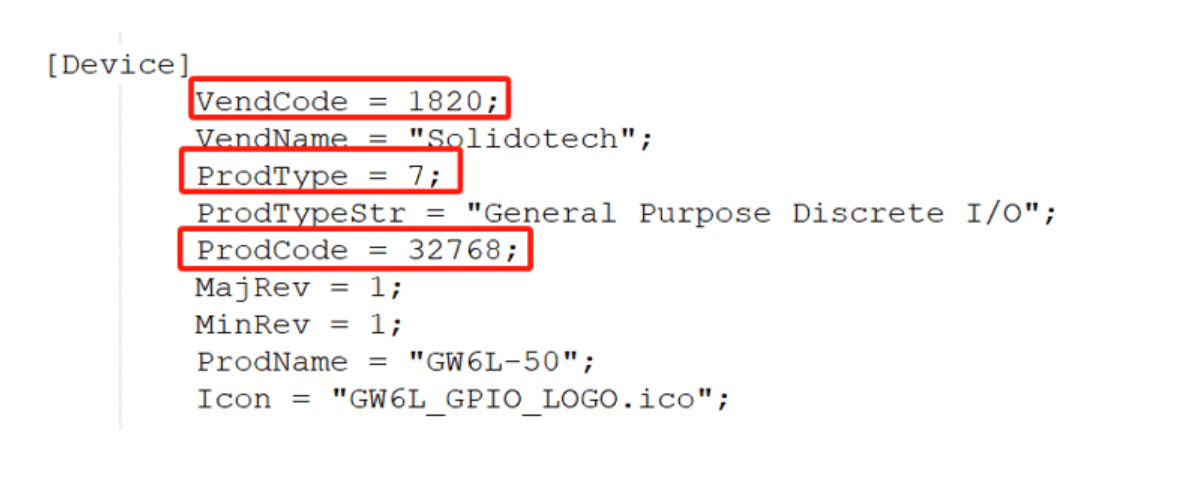
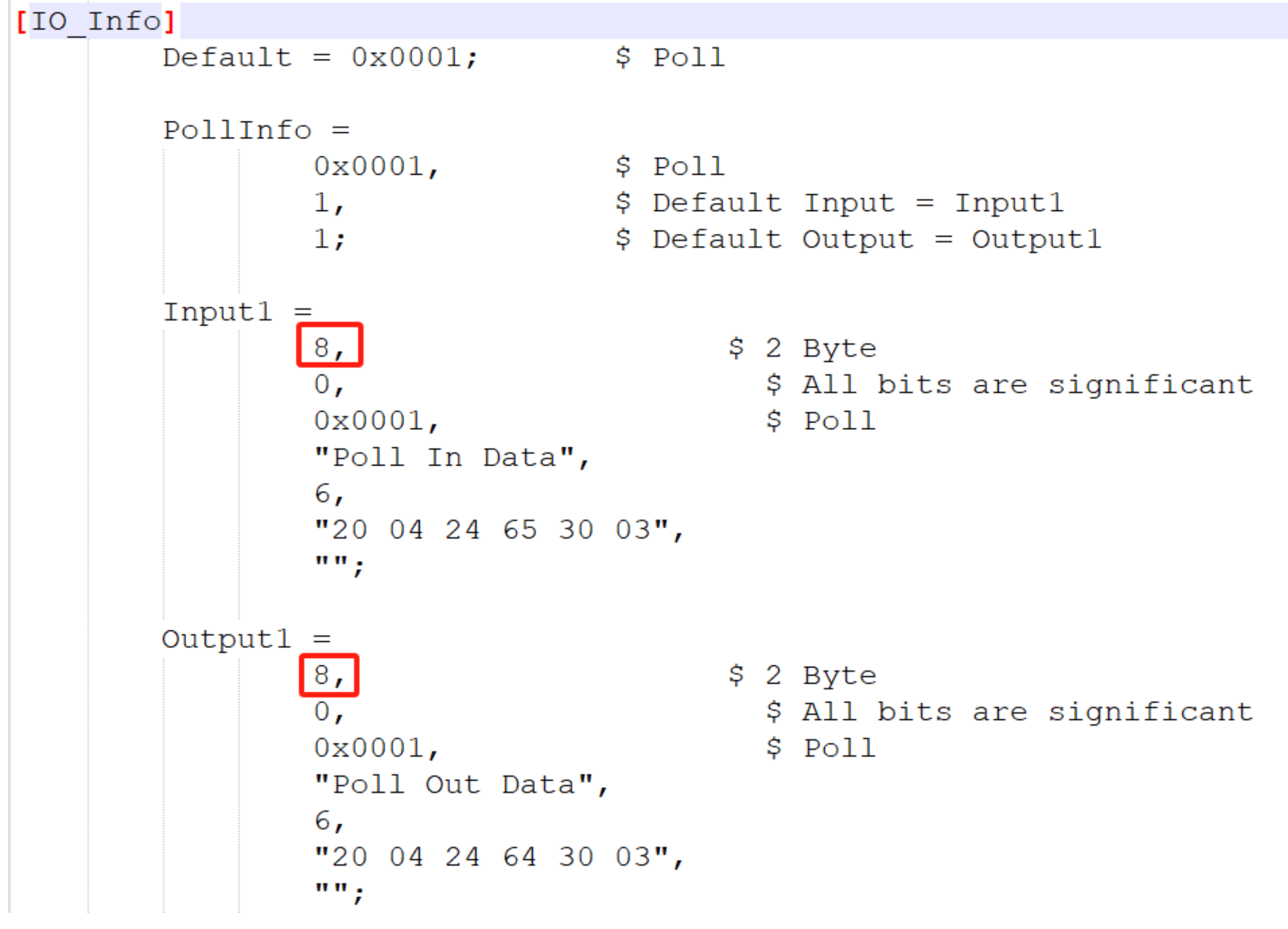
将上图参数填写进入网关。
配置完成后下载进入网关。并开始配置200Smart
基础知识
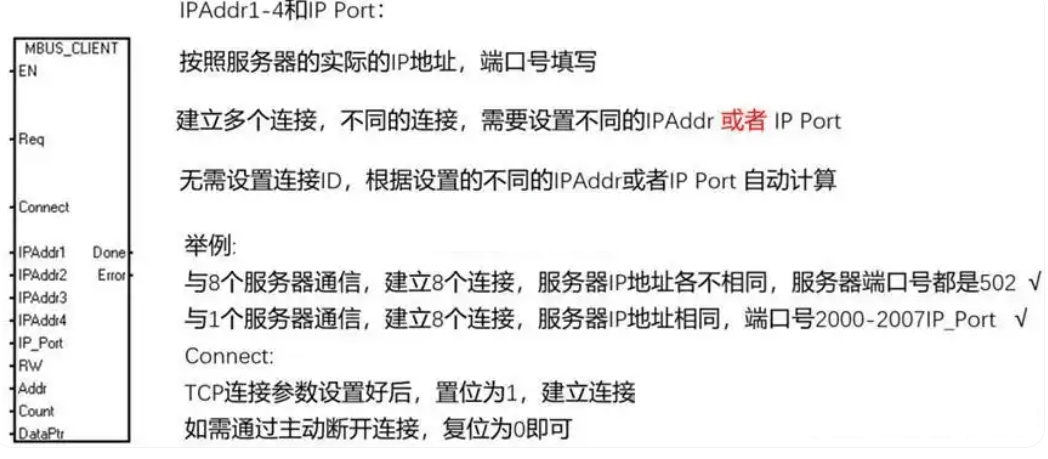
(1)200SMART 和其他设备采用 Modbus TCP 通信协议的时候,得调用软件本身自带的通信指令才能实现编程。就像下面这张图展示的那样:“MBUS_CLIENT”是客户端的指令,“MBUS_SERVER”是服务器的指令。
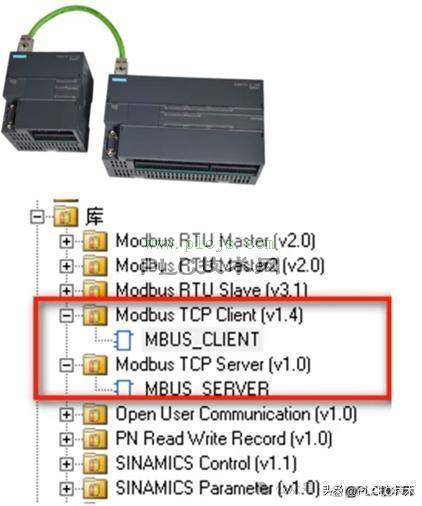
(2) “MBUS_CLIENT”是客户端指令
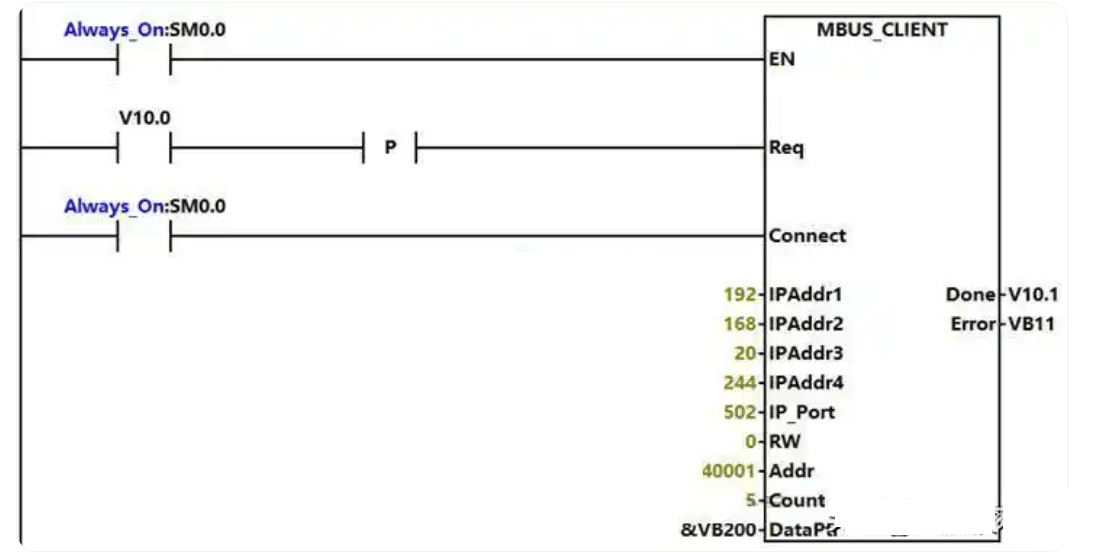
“MBUS_CLIENT”指令能让 S7-200 SMART CPU 变成 Modbus TCP 客户端,然后通过以太网跟 Modbus TCP 服务器进行通信。凭借“MODBUS_CLIENT”指令,可以在客户端和服务器之间搭建连接、发送 Modbus 请求,还能接收响应。


指令管脚填写如下图所示:
编写指令要点:
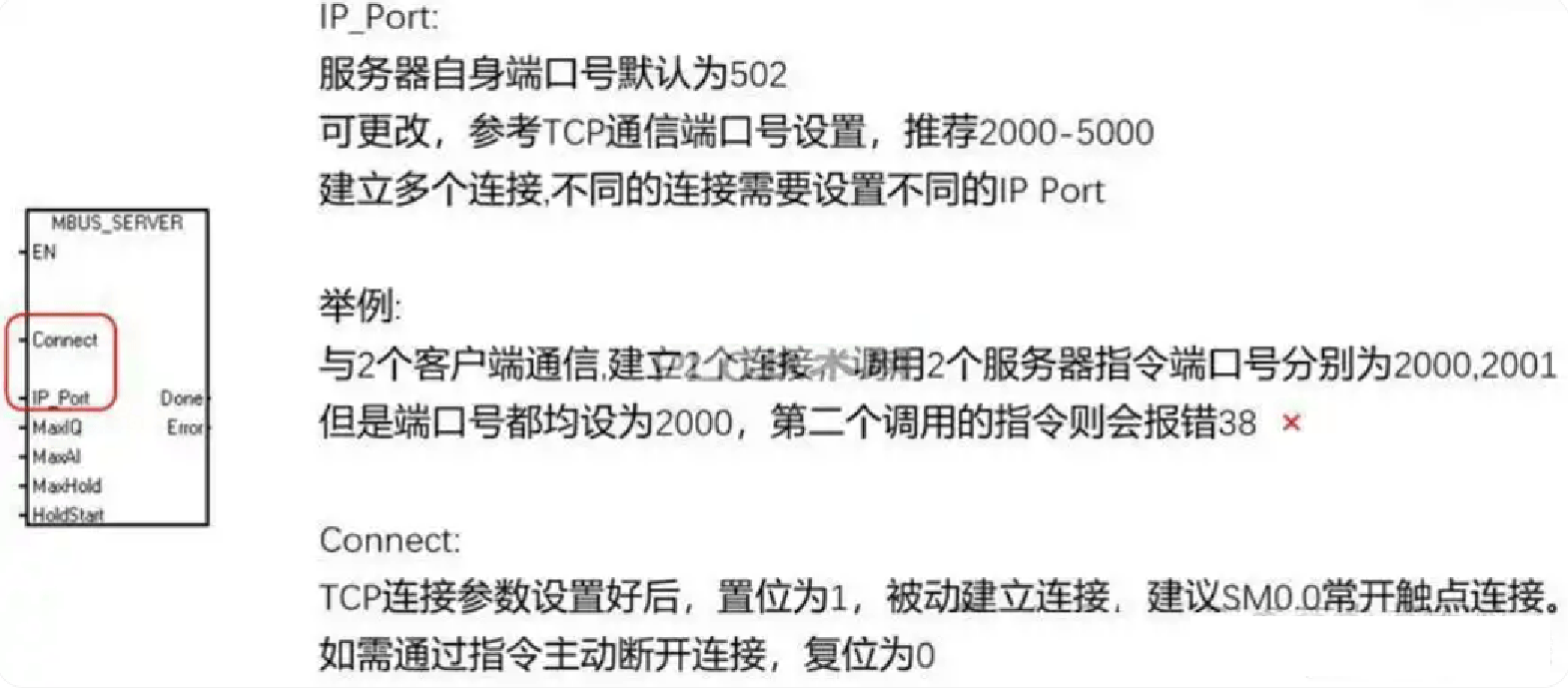
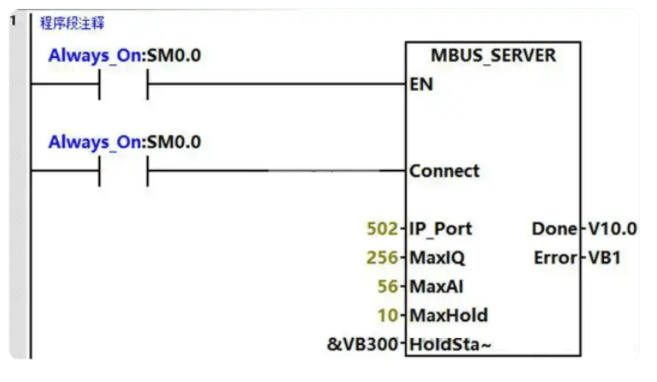
服务器指令:
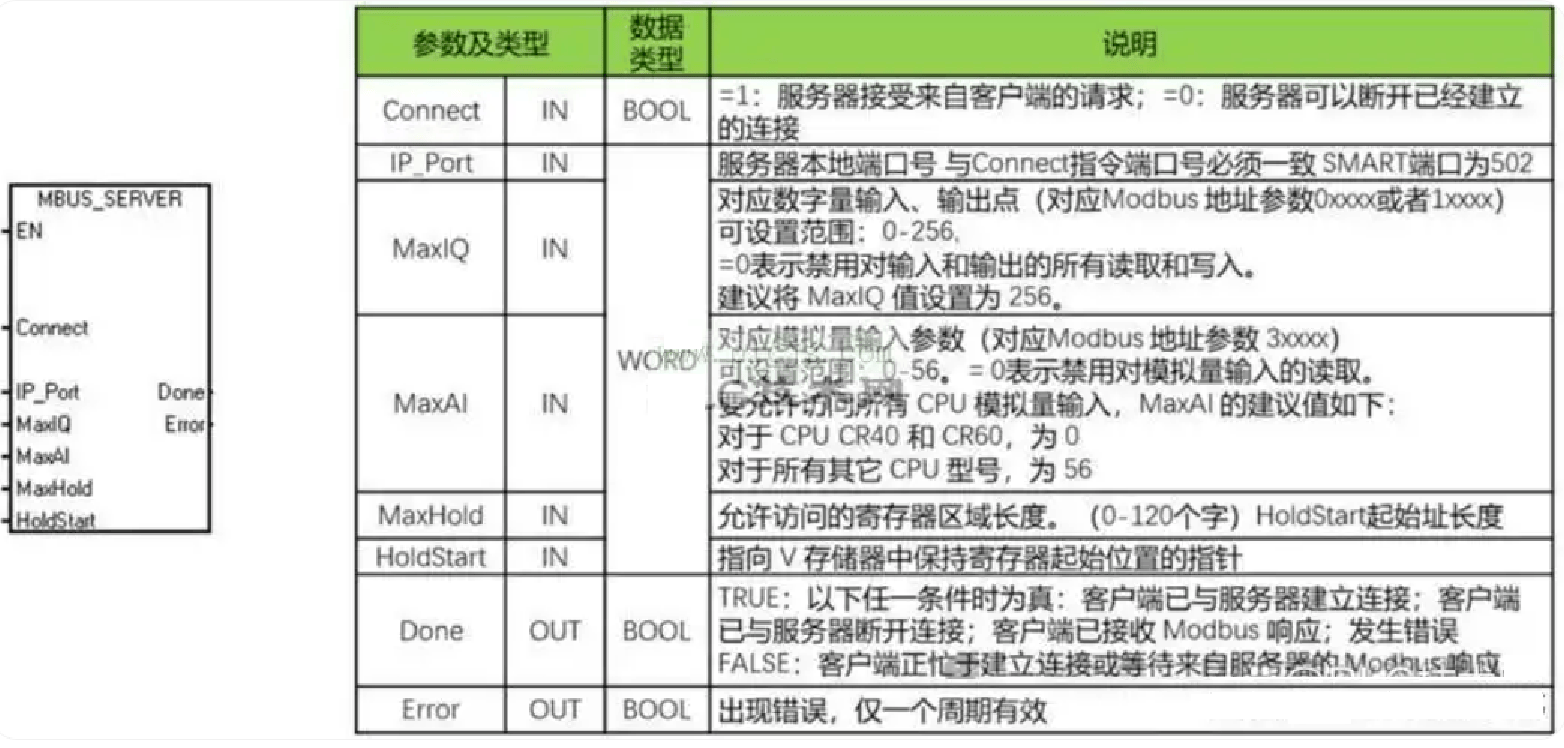
服务器指令编程要点:
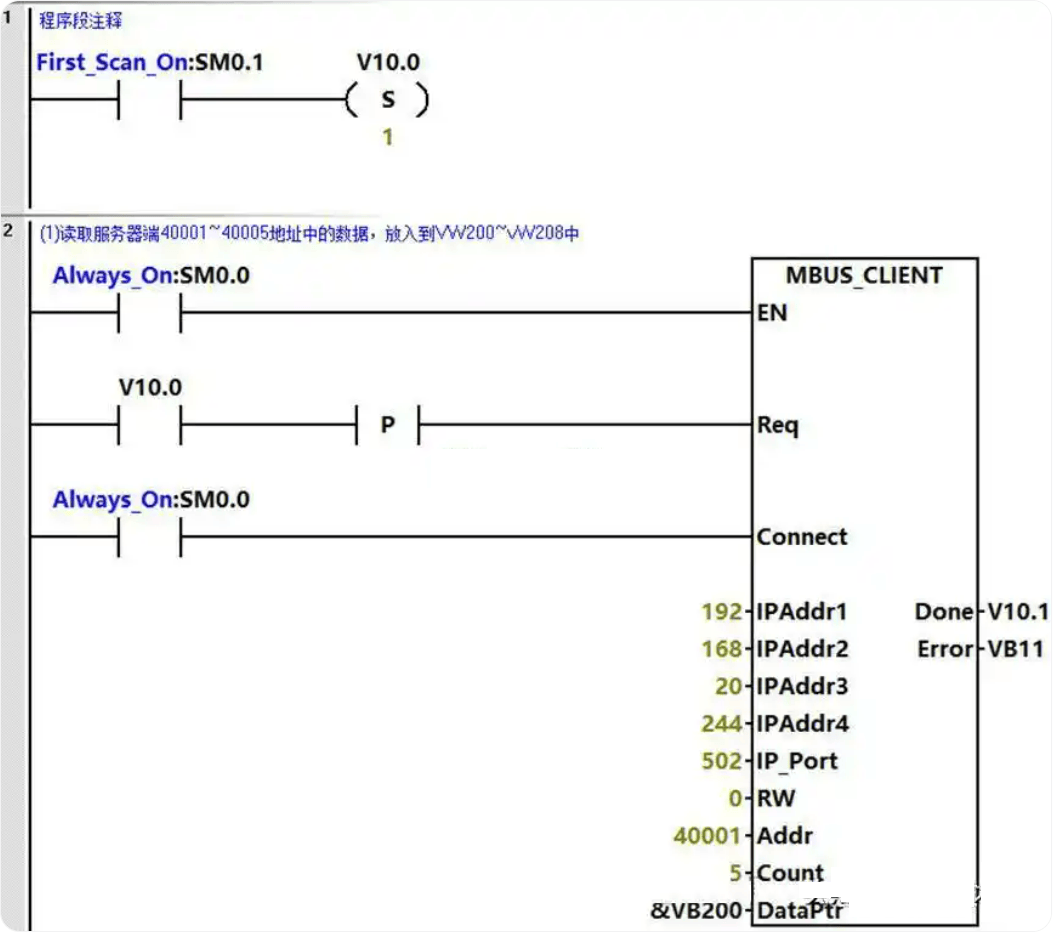
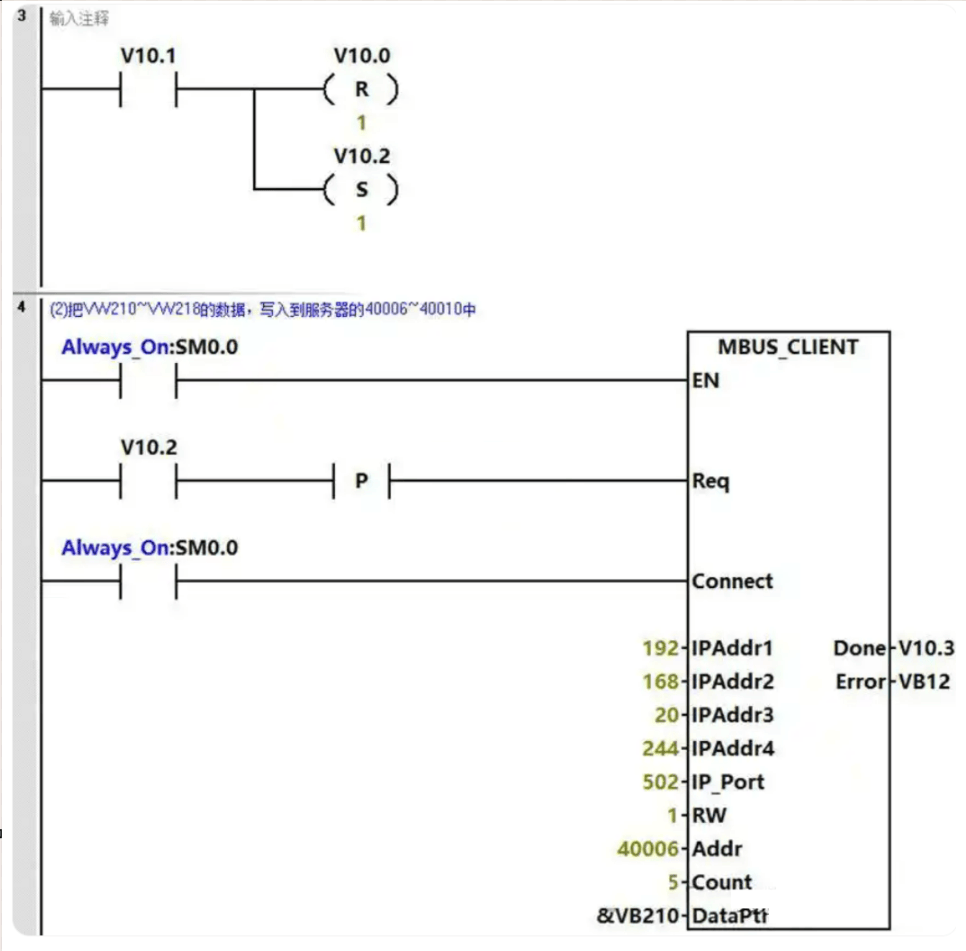
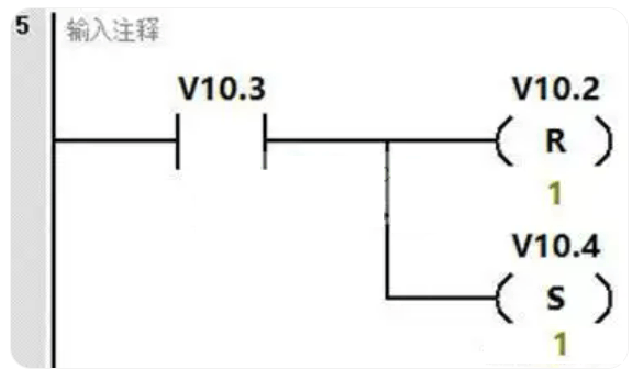
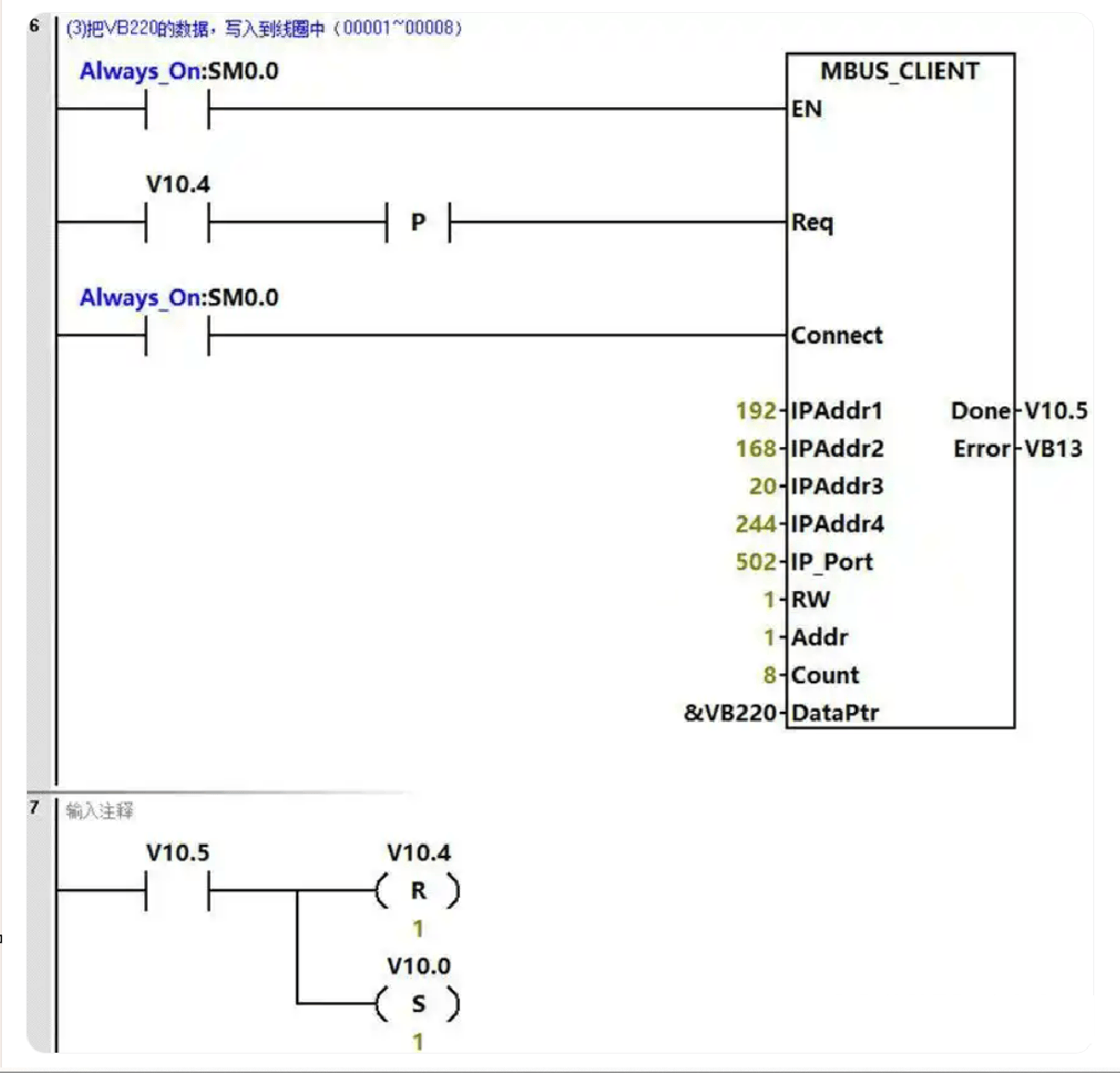
3.用指令根据控制要求编写程序
(1)客户端程序
(2)服务器程序
配置完成后将组态下载进PLC,设定好阀岛的从站地址后,将所有设备上电,观察指示灯状态正确后及代表通讯正常。
审核编辑 黄宇
你可能感兴趣的文章
- 魏牌V9X上市期待这么久终于上市了,34.98万元起!
- 苏宁易购拟1元底价“甩卖”家乐福中国主体:持续推进非主营业务瘦身
- 浙商策略:双创冲高回落大盘调整 短线或震荡、中线暂无忧
- 全线跳水!超15万人爆仓!霍尔木兹海峡,大消息
- 韩国股市重挫 启动卖方“熔断机制”!
- 注意风险!5月以来超110只ST股下跌 3股已腰斩
- 单笔订单总额超全年营收!一字涨停后,华秦科技回应:今年干不完
- 稀缺!高研发+高成长的优质次新股 仅10只(附名单)
- 335亿元市值上市公司 第六大股东是演员张凌赫?公开信息显示非同一人 公司回应
- 国信策略:A股日历效应还有效吗?
- 云南锗业十倍股 磷化铟概念龙头爆发(附名单)
- 一家精神病院炒股成前十大股东 力压高盛 曾套现273万元 当地回应
- 【风口研报】国内首个大规模算电协同绿电项目投运 绿电板块有望迎增长新纪元
- 官司打赢了,钱却没到账?永辉超市亏损25亿元后又陷36亿元追债困局
- 东阳光拿到金额最高190亿算力大单 东莞首富抢占AI产业风口
- 五家上市险企一季度新业务价值普涨 是否已进入新一轮修复周期?