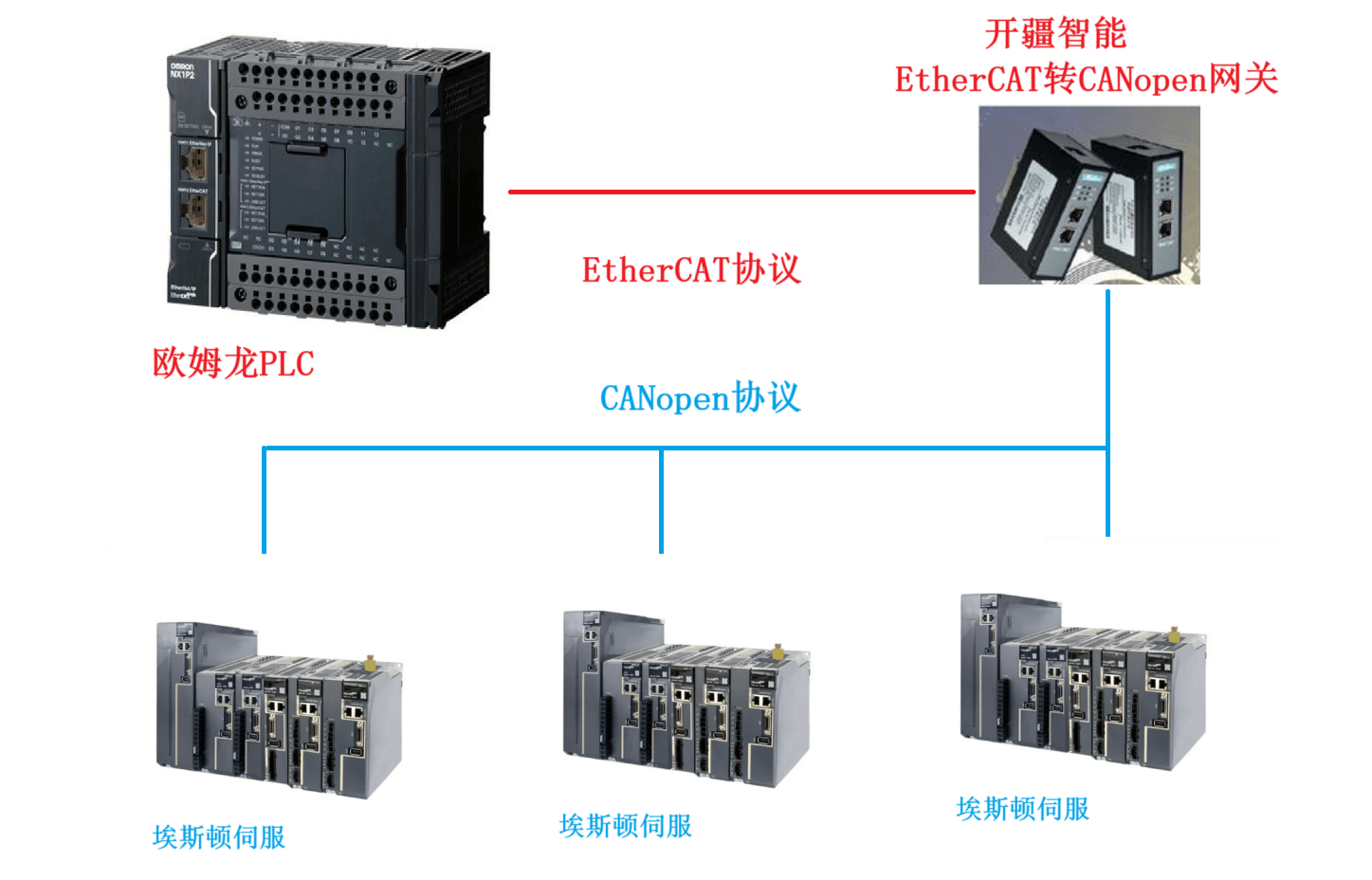
开疆智能EtherCAT转CANopen网关连接埃斯顿伺服驱动器配置案例
本案例是欧姆龙PLC通过EtherCAT转CANopen网关控制台达伺服的配置案例
具体配置方式如下。
配置过程:
首先进行PLC一侧的EtherCAT通讯设置
PLC配置
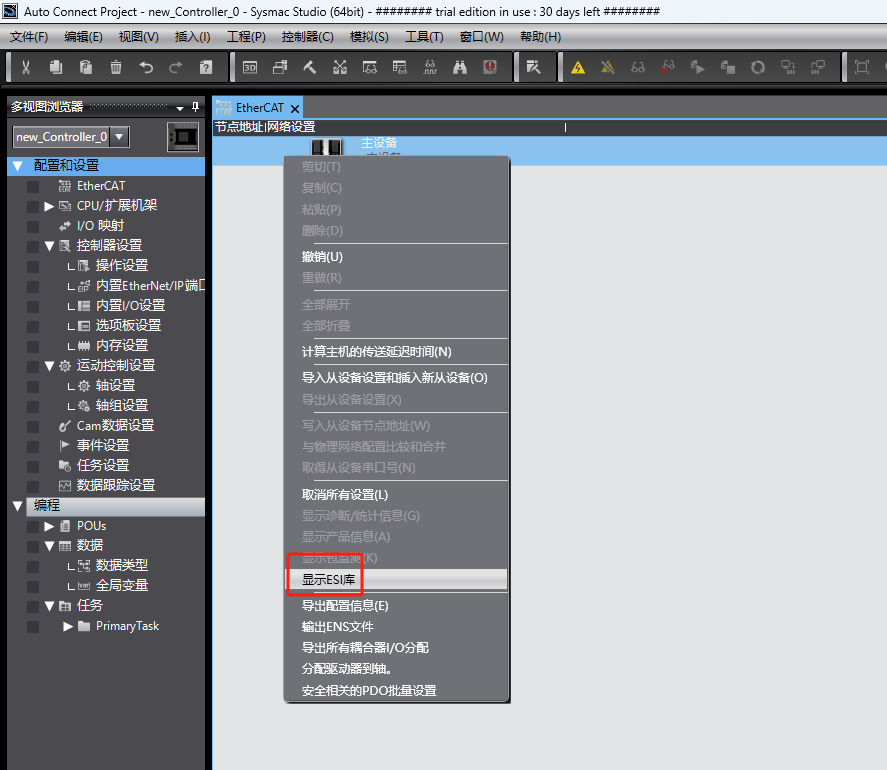
1. 打开欧姆龙配置软件Sysmac Studio
2. 双击EtherCAT,在主设备处右键选择显示ESI库
3. 在弹出的对话框中选择安装文件
4. 选择网关的ESI文件
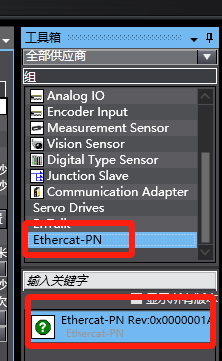
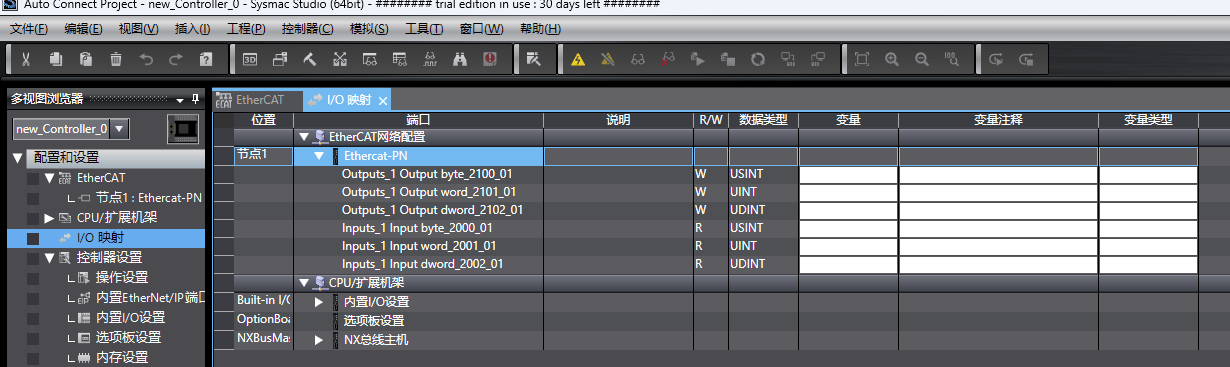
5. 添加完成后选择Ethercat-PN
6. 1设置好网关参数
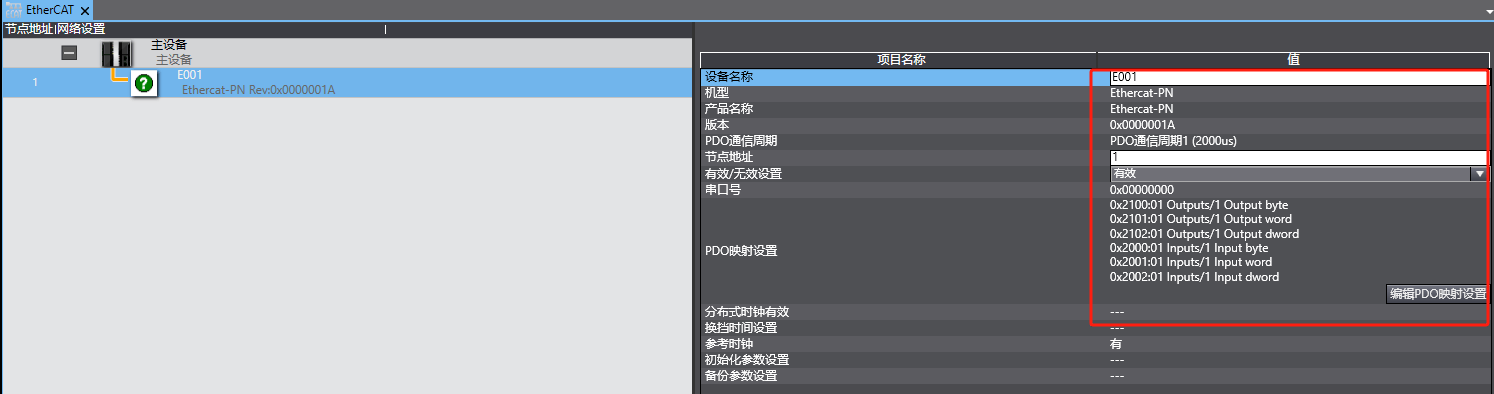
7. 打开IO映射设置好变量
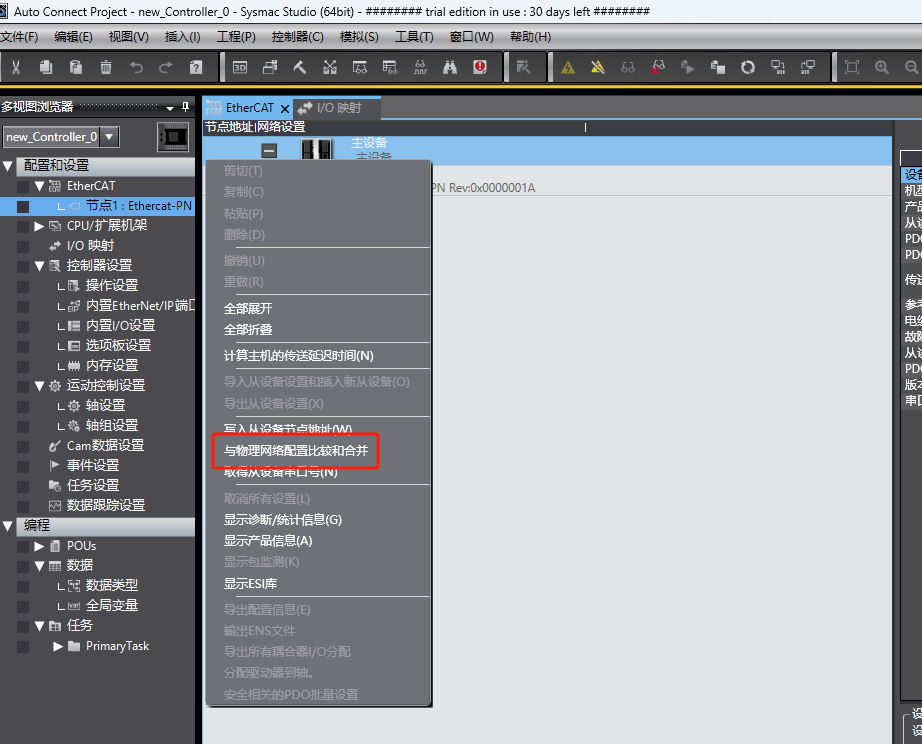
8. 将PLC在线,在主站处右键选择与物理网络配置比较和合并
9. 完成后将组态下载至PLC,打开网关配置软件进行配置。
网关配置
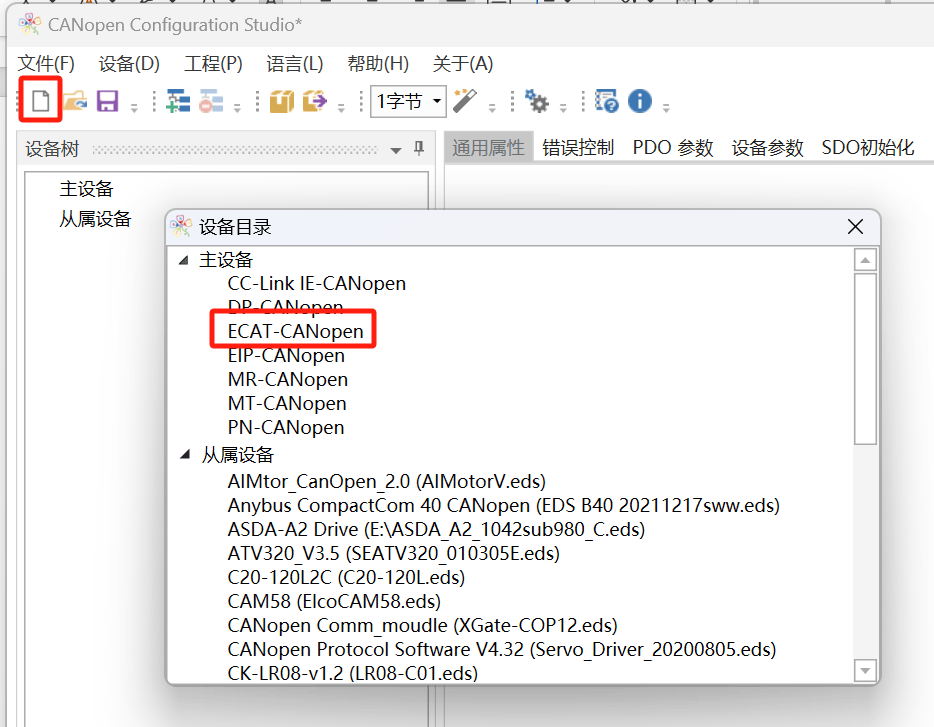
打开网关配置软件“CANopen Configuration Studio”新建项目选择“ECAT-CANopen”
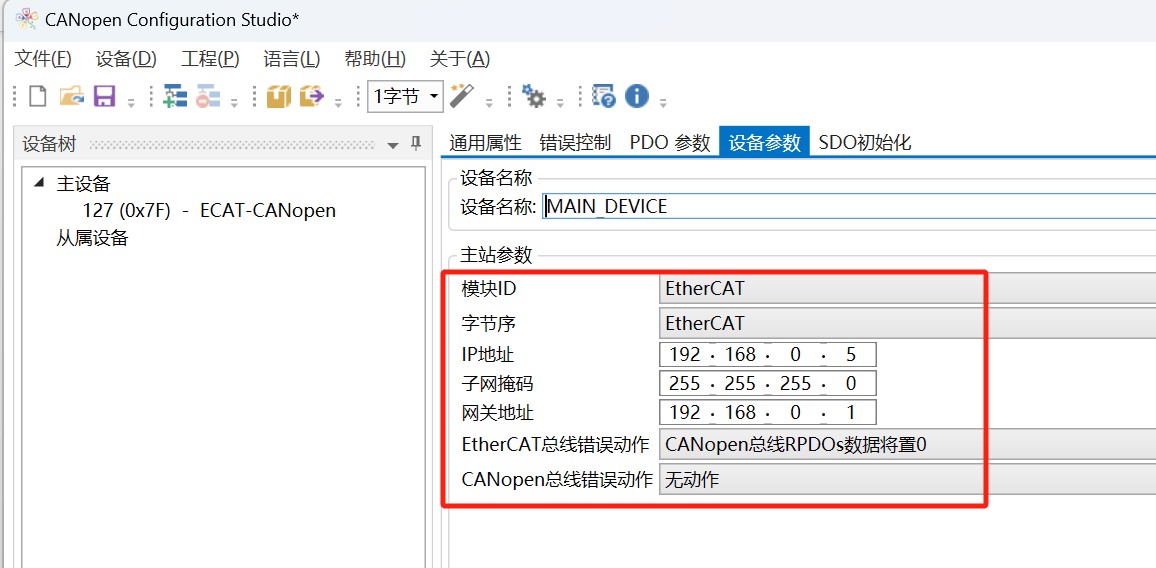
设定网关的canopen一侧波特率,和从站保持一致
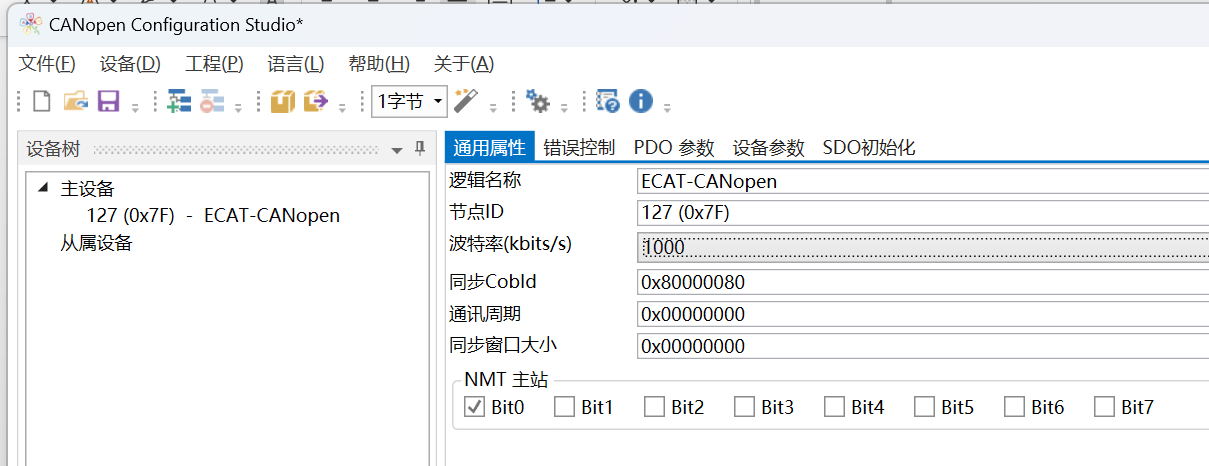
设置网关的字节序,下载IP以及掉线后网关的数据处理方式。
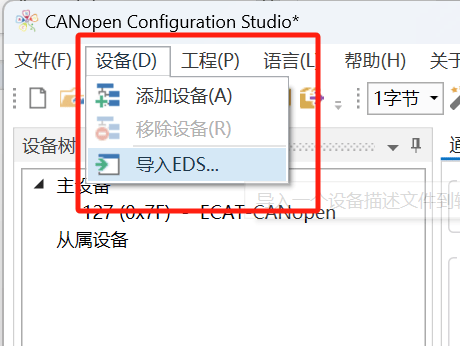
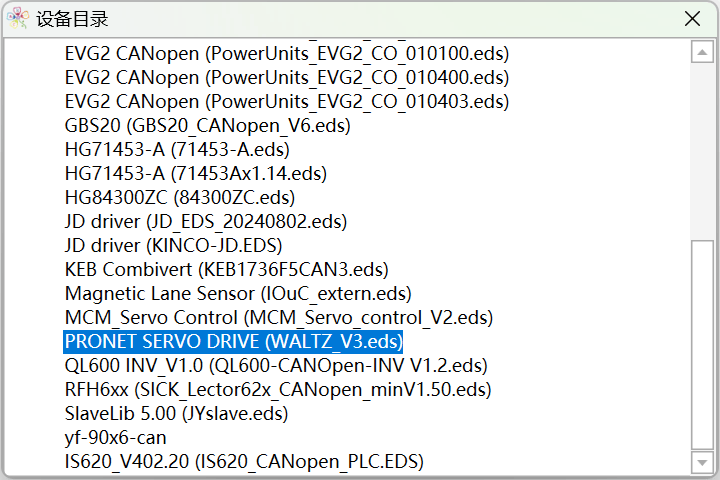
完成后点击设备-导入EDS文件(从站EDS文件可从伺服官网下载)
点击添加从站,每个从站分别配置站地址(此处我们以1台设备为例)
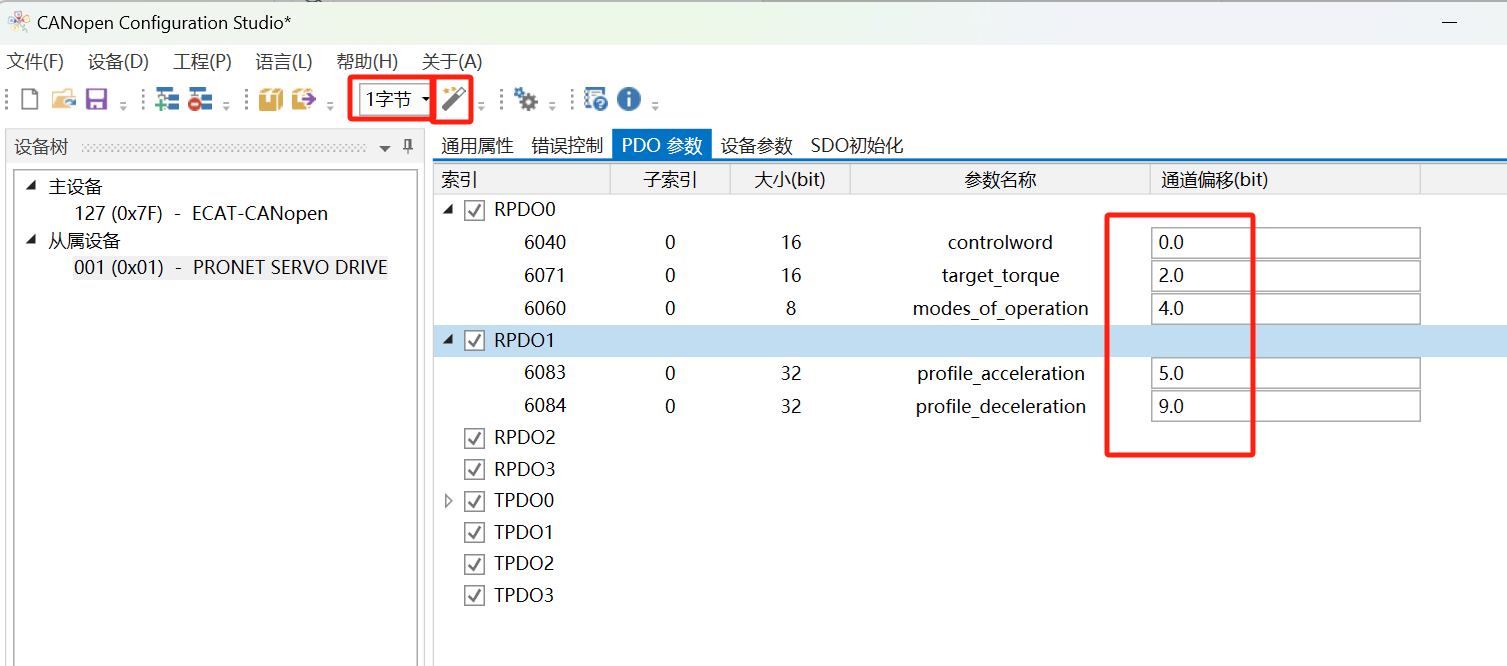
勾选要用到的PDO添加参数,添加需要用到的索引
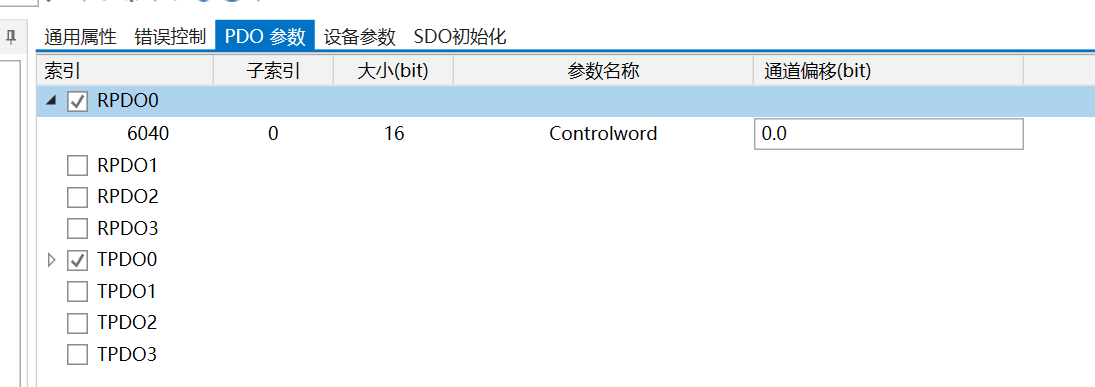
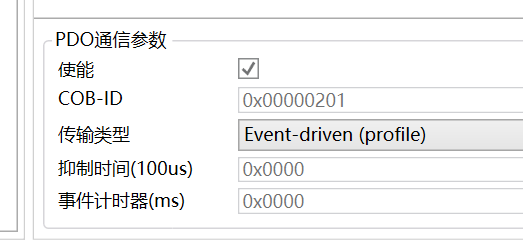
设定每个PDO的通讯参数(如传输类型,周期时间等)
设置完参数后,点击自动分配内存映射设置通道偏移。
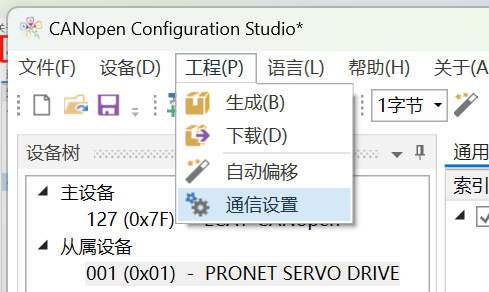
设置完成后点击通信设置,扫描网关IP后点击生成-下载即可把配置下载进网关。
配置完成后设置从站伺服驱动器参数。
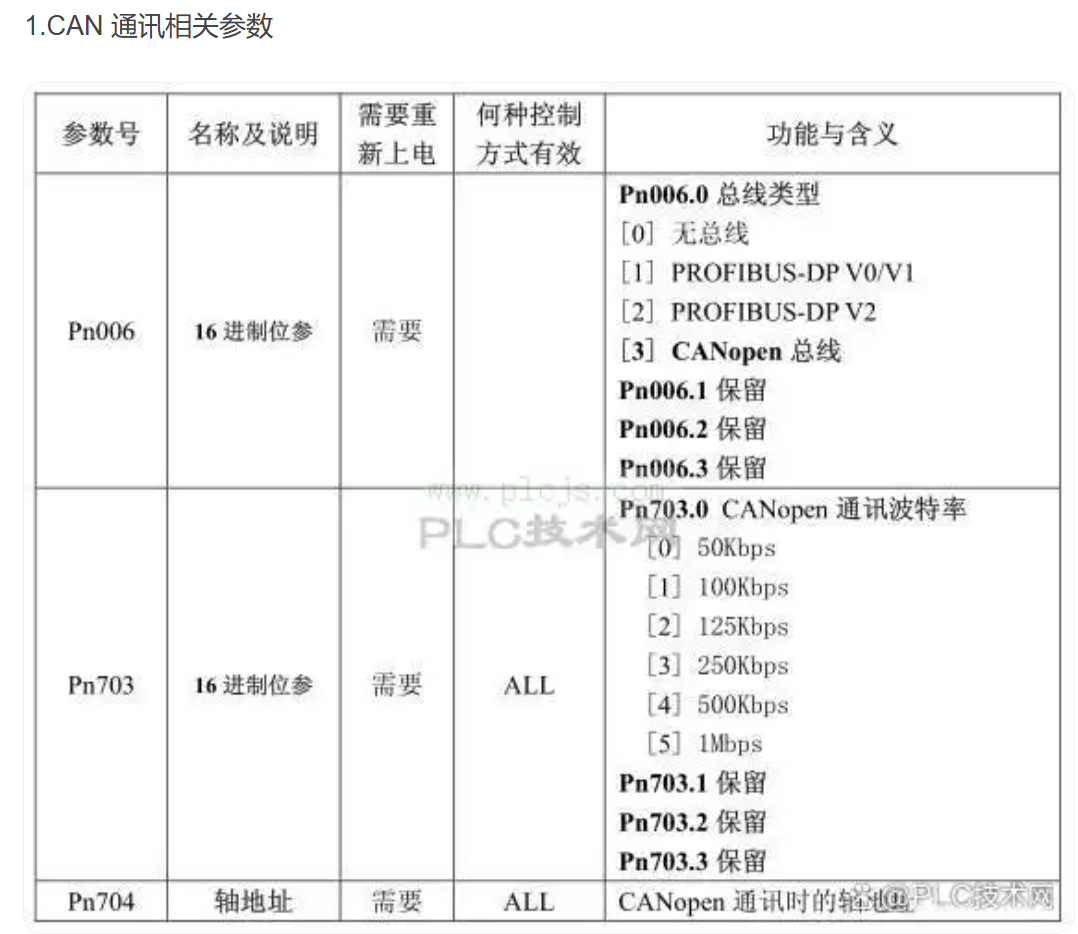
通过驱动器面板设置从站通讯模式为CANopen,703/704设置站地址和波特率
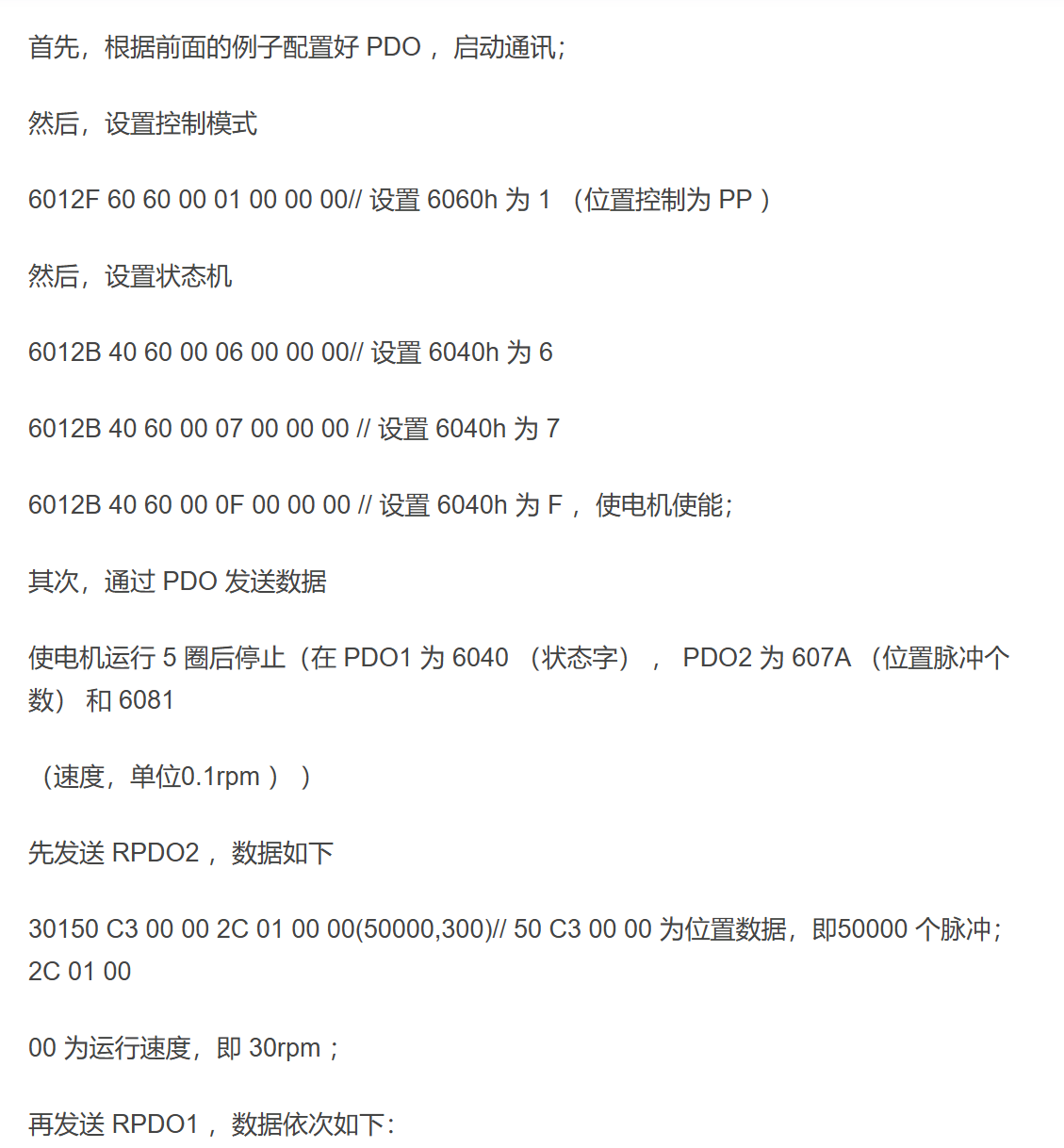
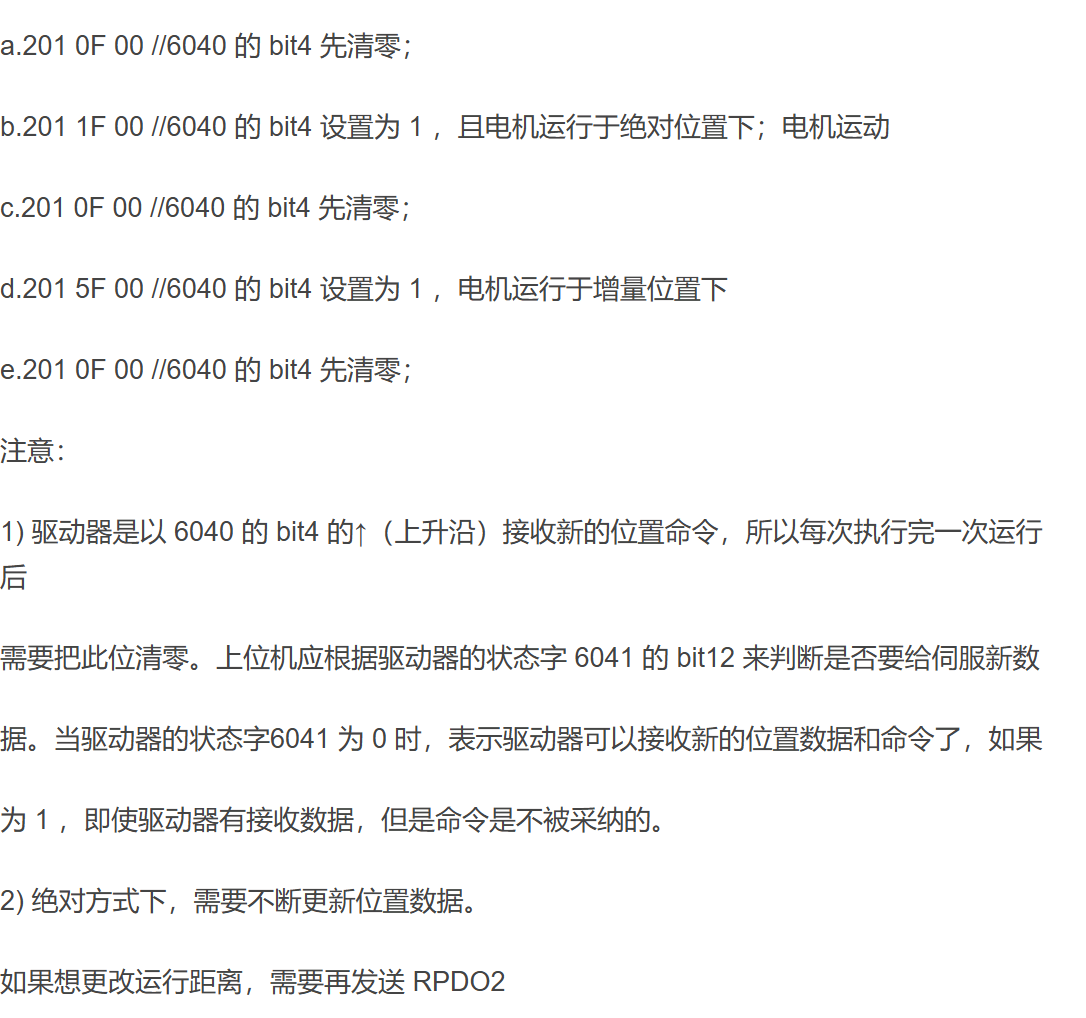
完成后根据从站手册发送的数值对从站进行操作。
到此,配置完成。
审核编辑 黄宇
你可能感兴趣的文章
- 成都启辰大V DD-i优惠高达2.30万 仅10.69万可入手
- 2026款酷路泽3500外观内饰改变 变化很大
- 成都小米SU7 Ultra报价52.99万起 暂无优惠
- 四川腾达东远名车红杉加规版价格最高优惠6万
- 长城H10将8月5日上市 预售价21.98-23.98万
- 成都平行进口丰田FJ酷路泽中东版优惠17万 欢迎上门试驾
- 成都思皓X8 PLUS价格最低10.98万起 暂无优惠
- 成都瑞虎8 PLUS降2.50万 最低仅售9.49万
- 尊界V680/V800将8月5日上市 预售价65万起
- 2026新款奔驰G级亚洲版目前售价119万起 欢迎前来试驾
- 成都长安UNI-V优惠高达2.20万 最低仅售9.39万
- 比亚迪2027款海豹06预告图发布 配激光雷达
- 丰田兰德酷路泽中东版团购钜惠35.2万 欢迎试乘试驾
- 质保升级落地:从177Ah电池事件看车企的责任应答逻辑
- 提车即享终身质保,启境GT7让智驾与安心一步到位
- 一周新车丨全新理想L6更能打,阿维塔07L定价很关键